Topics
- Anatomy of Human Hand
- Present Data Glove Technologies
- Glove Accessories
- Applications
- My Project
1 Anatomy of Human Hand
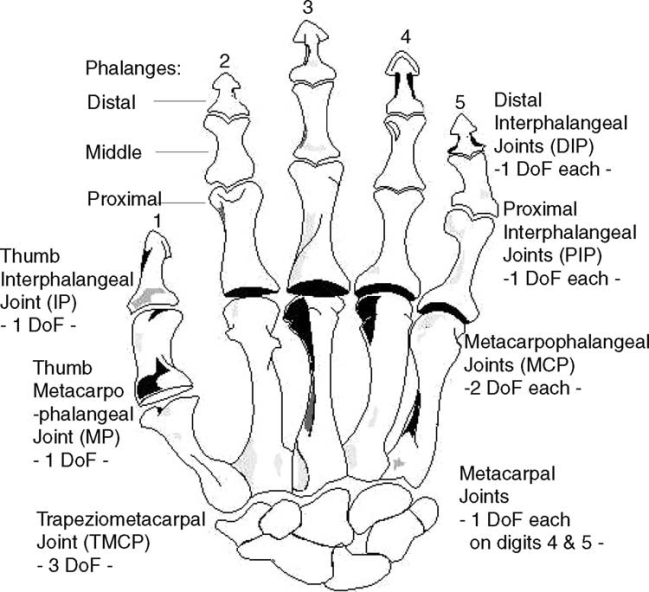

Human hand has 23 degrees of freedom:
4 in each finger,
3 for extension and flexion and
one for abduction and adduction;
thumb is more complicated and has 4 DOF;
leaving 3 DOF for the rotation of the wrist
2 Present Data Glove Technologies
-
Pinch Glove

Image Courtesy: http://www.mechdyne.com/

The first prototype, originally called the Chord Glove, was developed by Mapes at the University of Central Florida.Commercialized by Fakespace Laboratories (Mountain View, CA), it uses electrical contacts at the fingertips, on the back of fingers, or in the palm. When two or more electrical contacts meet, a conductive path is completed and a posture can be made. The PinchGlove interface detects whether a posture has been made and keeps a record of the posture duration. Postures can be programmed, and no additional posture recognition techniques are required. This makes the PinchGlove excellent for posture recognition with over 1000 postures theoretically possible.It uses polling algo. Asalient feature of this glove is that it does not require calibration. [1]
-
Didgi Glove

Image Courtesy [1]

Commercialized by Didjiglove Pty, Ltd., the Didjiglove uses ten capacitive bend sensors to record finger flexion (fingers MCP and PIP, and thumb TCMP and MP). The sensors consist of two layers of conductive polymer separated by a dieletric. Each layer is comb-shaped; a change in the amount of sensor bending results in a change in the overlapping electrode surface, and ultimately in a change in capacitance. The Didjiglove requires calibration: to calibrate the glove, the user makes hand shapes and records these by pressing. It has small glove latency (10ms) It is designed for computer animation, and specifically to function as an advanced programming interface for toolkits such as 3-D Studio Max and Maya for which software drivers are provided. [1]
-
Cyber Glove

Image Courtesy: http://www.vrealities.com/ -

Cyber Force Image Courtesy: http://www.prweb.com/


CyberGlove, created by Virtual Technologies, Inc. in 1990. Virtual Technologies was acquired by Immersion Corporation in September 2000. In 2009, the CyberGlove line of products was divested by Immersion Corporation and a new company, CyberGlove Systems LLC, took over development, manufacturing and sales of the CyberGlove.[2]

It comes equipped with 18 or 22 piezo-resistive sensors. The 18-sensor model features two bend sensors on each finger (MCP and PIP joints), and four abduction/adduction sensors ,plus sensors measuring thumb crossover, palm arch, wrist flexion, and wrist abduction/adduction. The 22-sensor model features four additional sensors for measuring DIP joints flexion. Calibration is needed to make glove measurements insensitive to differences in users’ hands, finger length, and thickness and convert sensor voltages to joint angles. It is performed with the Virtual Hand calibration software by having the user flex their hand a few times and editing the gain and offset parameter value for each sensor to best match the motion of the virtual hand to the physical hand. [1]
In addition to the CyberGlove, Immersion Corp also developed three other data glove products: the CyberTouch, which vibrates each individual finger of the glove when a finger touches an object in virtual reality; the CyberGrasp which actually simulates squeezing and touching of solid as well as spongy objects; and the CyberForce device which does all of the above and also measures the precise motion of the user’s entire arm.
-
Human Glove
Patented in 1997, it is commercialized by Humanware Srl (Pisa, Italy). It is equipped with 20 Halleffect sensors that measure flexion/extension of the four fingers MCP, PIP, and DIP joints and flexion/extension of the thumb TMCP, metacarpal phalangeal (MP), and interphalangeal (IP) joints, aswell as fingers and thumb abduction/adduction; two additional sensors measure wrist flexion and abduction/adduction.Glove calibration is similar to that of the CyberGlove and is performed through a software package called Graphical Virtual Hand, which displays an animated hand that mirrors movements of the user’s hand.
The Humanglove is a sensorized elastic fabric glove designed and commercialized by Humanware. The Humanglove is equipped with 20 Hall effect sensors. Each sensor measures data related to a DOF of the hand. The nominal sensor characteristics are resolution, 0.4° over a range up to 90°; linearity, about 1 percent full-scale output; and accuracy, about 1°. However, no information about the sensors is available concerning their performance when they are mounted on the elastic fabric glove.[1]
-
5DT Data Glove
Uses optical-fiber flexor sensors 1 sensor per finger to measure overall flexion of the

four fingers (average of MCP and PIP joint flexion) and thumb (average of MP and IP joint flexion)& 1 tilt sensor to measure tilt of wrist. Gesture library uses binary open/close configurations for the fingers, excluding the thumb, so that 2^4 = 16 possible gestures can be generated. (V) [1]
3 Glove Accessories
A complete description of hand movement requires knowledge of
1. Hand configuration (amount of joint bending or joint relative positions) – Sensor Glove
2. Hand position in space (location and orientation of the hand, for a total of 6 DoFs—3 for translations and 3 for rotations) – 3 D Trackers
Key performance parameters of sensor– accuracy in dergrees , jitter, drift and Latency
Sensor are broadly classified into
- Magnetic
- Ultrasonic
- Optical
- Inertial
Tracker |
Principal |
Advantage |
Disadvantage |
Magnetic-Hall-effect eg RFID |
Magnetic field producedby a stationary transmitter to determine the positionof moving receiver element | lowcost, reasonable accuracy, and no requirement of directline of sight transmitter–receiver | sensitivity to magnetic fields and ferromagnetic materials. |
Ultrasonic |
Ultrasonic signalproduced by a stationary transmitter to determine the positionof a moving receiver | No metallic interference | Suffer from echoes from hard surfacesRequire direct line of sight Update rate is approximately 50 datasets/s, less than half that of magnetic trackers |
Optical |
Uses optical sensing to determine the real-time position/orientation of an object | Insensitive to metallic interference | line of sightSensitivity to reflection of light from surfaces in theenvironment. |
InertialEg Accelerometer |
measures the rate of change of an object’s orientation or therate of change of an object’s translation velocity | Unlimited rangeNo line-of-sight constraintsLow sensor noise | Sensitive to drift and bias of thesensors |
4 Applications
- 3D Modelling
- Virtual Training
- Control a robot
- Tech a robot in natural way
- Video Games
- Communication System for Deaf
- Motor rehabilitation, human motion analysis
- Wearable Computers
- (V)
5 My Project
Till now I completed the survey of kinds of Data Glove and the kind of technology they use. I have also created my virtual reality model. Future steps I will undertake
- Decide Sensor’s which are most appropriate for my application
- Intergate sensors with hardware to process the data- NI Hardware (V)
- Virtual Hand Designing in Autodesk Inventor(Completed)
- Integrating VR Hand to sensory data – NI Labview
Pics of hand I designed in Autodesk Inventor
 |
 |
 |
 |
 |
 |
| |
 |
 |
So keep following this post for viewing the future work in this project!!!!!
#References
[1] Dipietro, L.; Sabatini, A.M.; Dario, P., “A Survey of Glove-Based Systems and Their Applications,” Systems, Man, and Cybernetics, Part C: Applications and Reviews, IEEE Transactions on , vol.38, no.4, pp.461,482, July 2008